Team Vicharaka is a team of first- and second-year students from the IISc undergraduate programmes participating in the European Rover Challenge (ERC) 2025. The ERC is one of the world’s leading robotics competitions for university students, held annually in Poland, challenging teams to design and build the next generation of Mars rovers to assist astronauts in future planetary exploration. This year, Team Vicharaka scored an impressive 94.5 out of 100 in the ERC video evaluation round, reflecting their strong design and presentation capabilities.

Team Structure
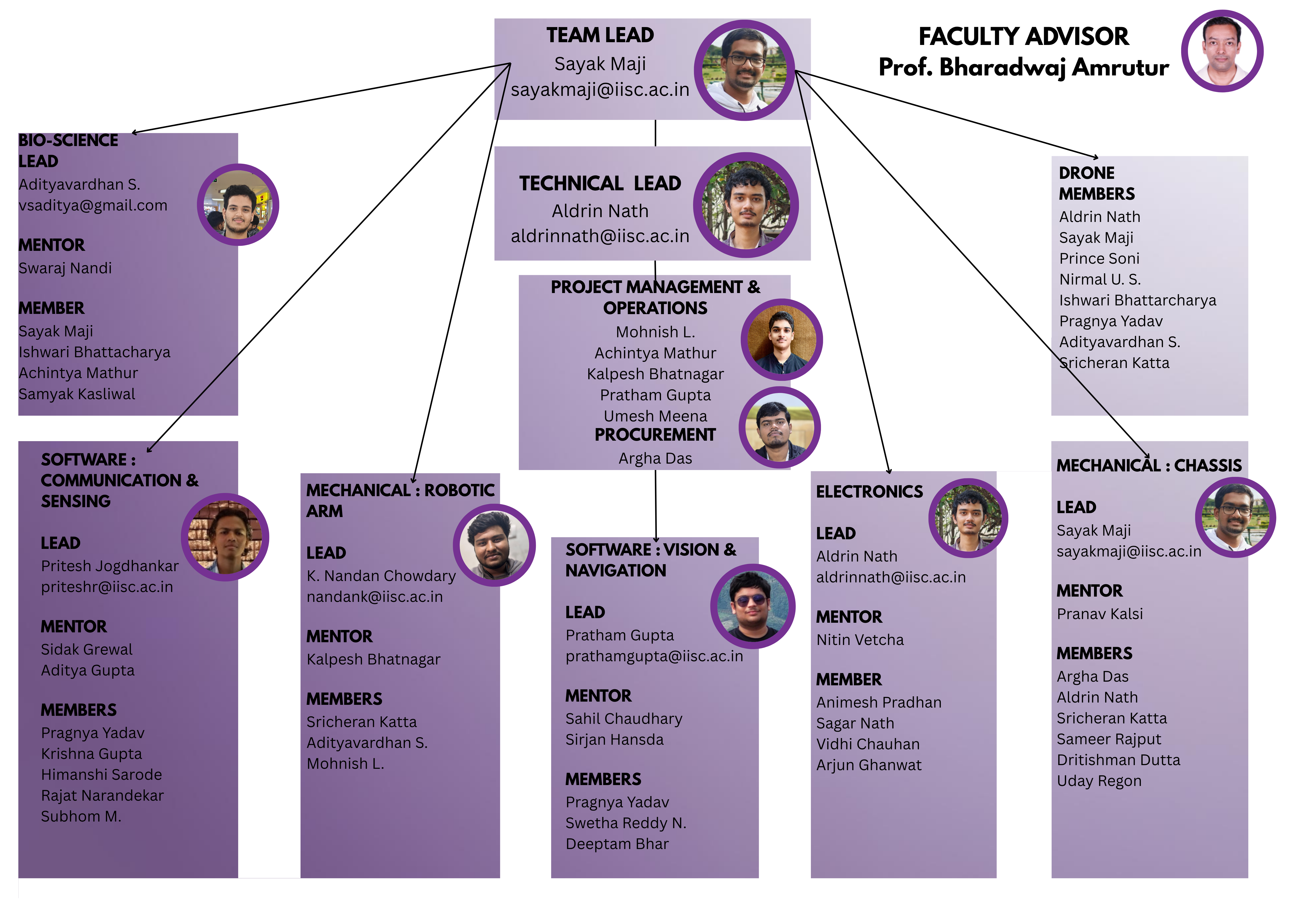


Sayak Maji
Batch: 2023
Team Lead
Aldrin Nath
Batch: 2023
Technical Lead
Mechanical
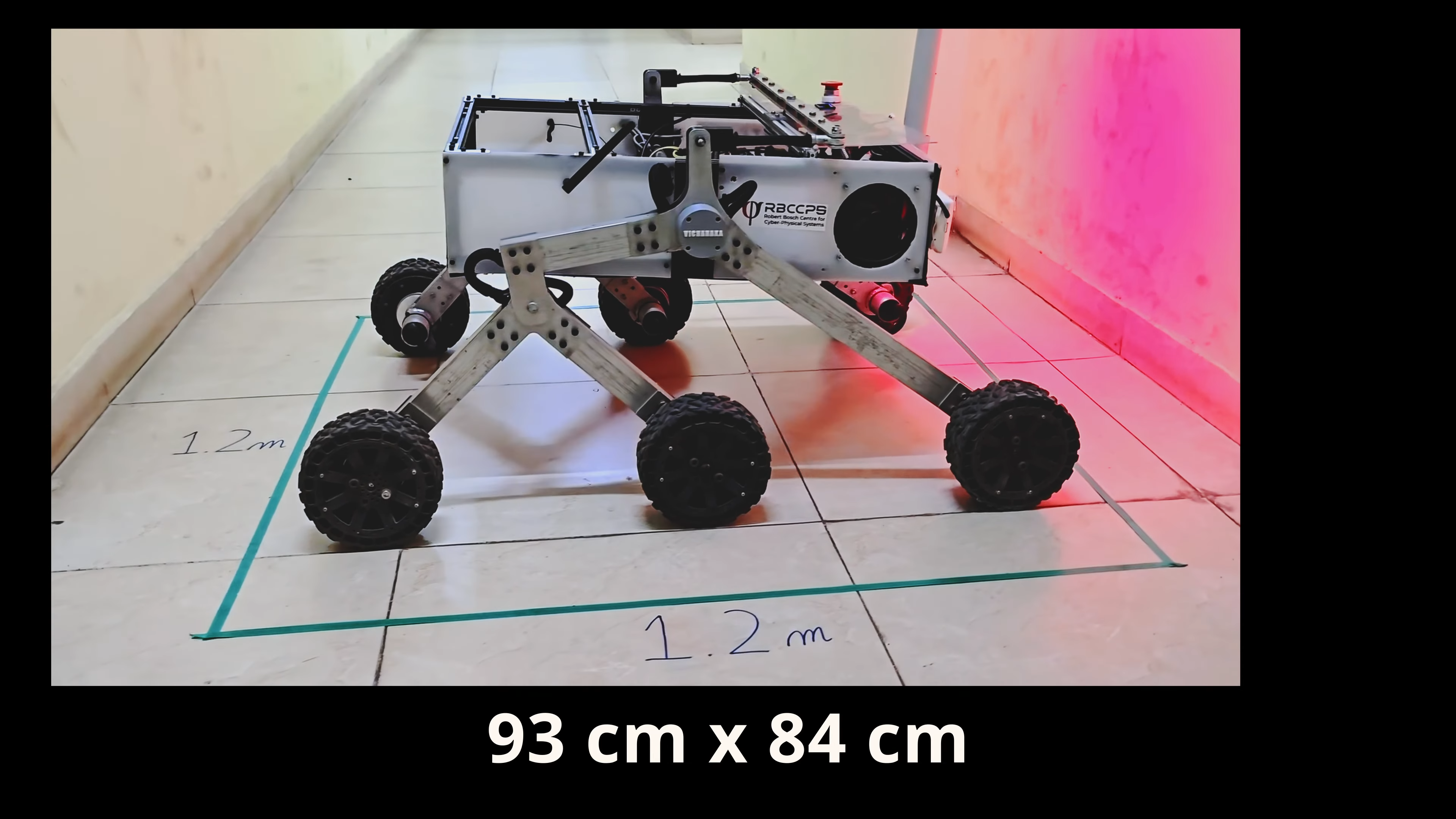
Our rover features a robust six-wheel differential rocker-bogie suspension system, engineered for exceptional mobility on demanding, Mars-like terrains. Its aerospace-grade 6061 aluminium structure, precisely fabricated through CNC machining, laser cutting, welding, and other precision techniques, is designed for rapid assembly and disassembly. Weighing under 50 kg with a compact yet stable wheelbase of 93 cm by 84 cm, the rover is purpose-built for reliable performance in the challenging conditions of the European Rover Challenge.
- Designed for easy field repair and modular upgrades during competitions.
- Equipped with standardized quick-connect interfaces for peripheral tools and sensors.
- Features integrated power distribution and monitoring for system safety.
- Supports future autonomy modules with ROS2-compatible architecture.
- Designed with EMI shielding to protect sensitive electronics from interference.

Sayak Maji
Batch: 2023
Mechanical Lead
Aldrin Nath
Batch: 2023
Mechanical Team
.jpg)
Sricheran Katta
Batch: 2024
Mechanical Team

Dhritishman Dutta
Batch: 2024
Mechanical Team

Sameer Rajput
Batch: 2024
Mechanical Team

Uday Regon
Batch: 2024
Mechanical Team
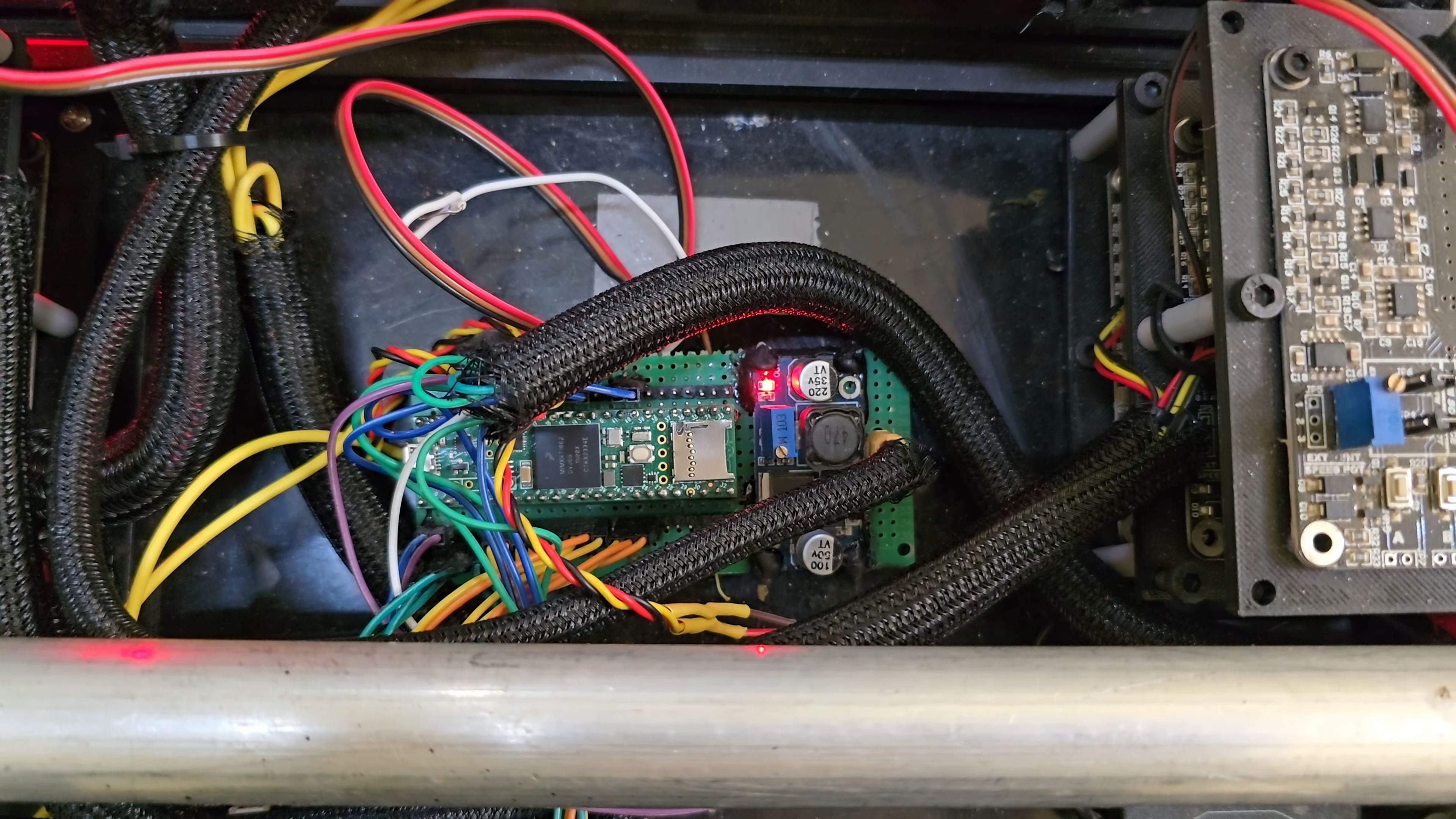
Electronics
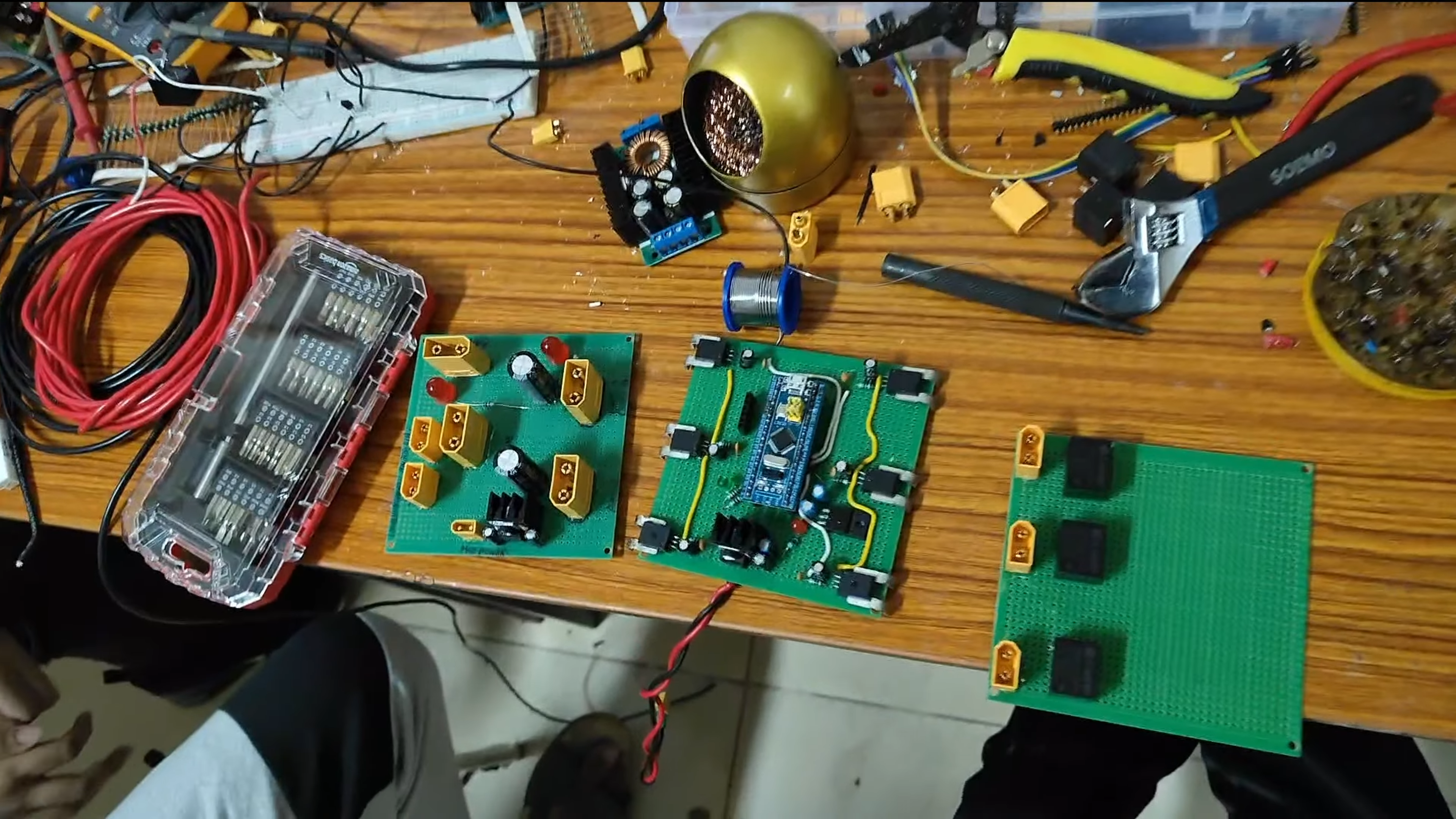
The rover’s electronics subsystem features a modular, robust architecture designed to reliably power and control all onboard systems. Centered around a custom power distribution board with STM32 microcontroller-based safeguards, the system ensures stable and efficient operation under demanding conditions while remaining easy to maintain and upgrade.
- 21 Ah, 24 V Li-ion battery providing over 180 minutes of continuous operation across all subsystems.
- Custom modular power distribution board with integrated current monitoring and multiple fail-safes for protection.
- Closed-loop PID motor control for precise speed and torque management on each wheel.
- Teensy 4.1 microcontroller supervising lower-level tasks with UART-based communication to the main controller.
Aldrin Nath
Batch: 2023
Electronics Lead
Sagar Nath
Batch: 2024
Electronics Team

Animesh Pradhan
Batch: 2024
Electronics Team
Vidhi Chauhan
Batch: 2024
Electronics Team
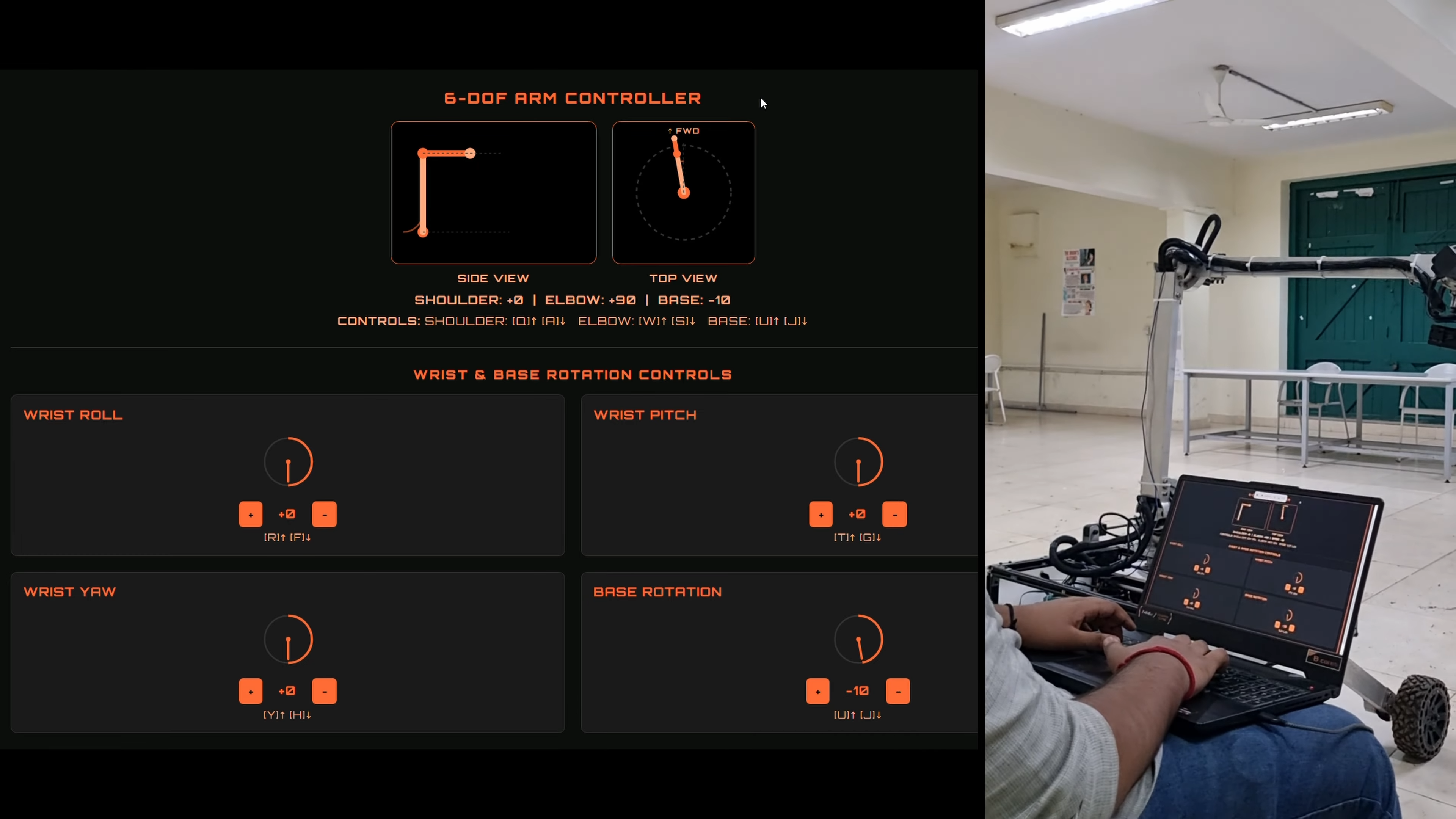
Robotic Arm
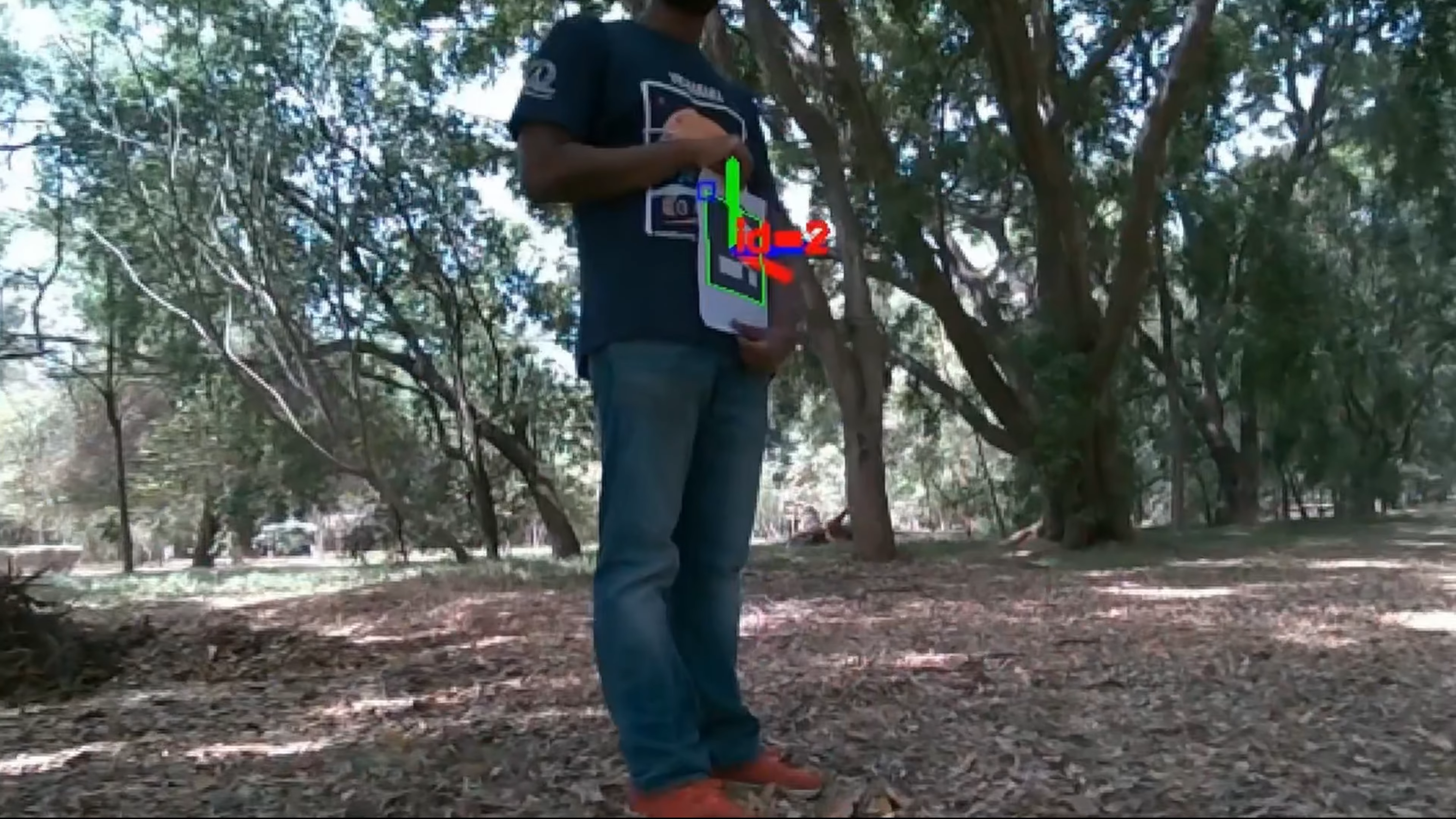
Our rover’s articulated arm offers six degrees of freedom with a payload capacity of up to 8 kg, combining high-precision harmonic drives with robust stepper motor actuation. Built from lightweight, high-strength 7075 aluminium and precisely machined in-house, the arm delivers exceptional accuracy, stability, and durability, making it ideal for complex and demanding field tasks.
- High-torque harmonic drives for near-zero backlash and precise motion across all joints.
- Autonomous and semi-autonomous control via micro-ROS, MoveIt 2, and a vision-guided perception system.
- Optimized structural design validated by FEA for high strength-to-weight performance.
- Two-finger gripper end-effector with object detection using ArUco markers and real-time ROS2 feedback.

K. Nandan Chowdary
Batch: 2024
Robotic Arm Lead
Sricheran Katta
Batch: 2024
Team Robotic Arm

Adityavardhan Srivastava
Batch: 2024
Team Robotic Arm
L. Mohnish
Batch: 2024
Team Robotic Arm
Science
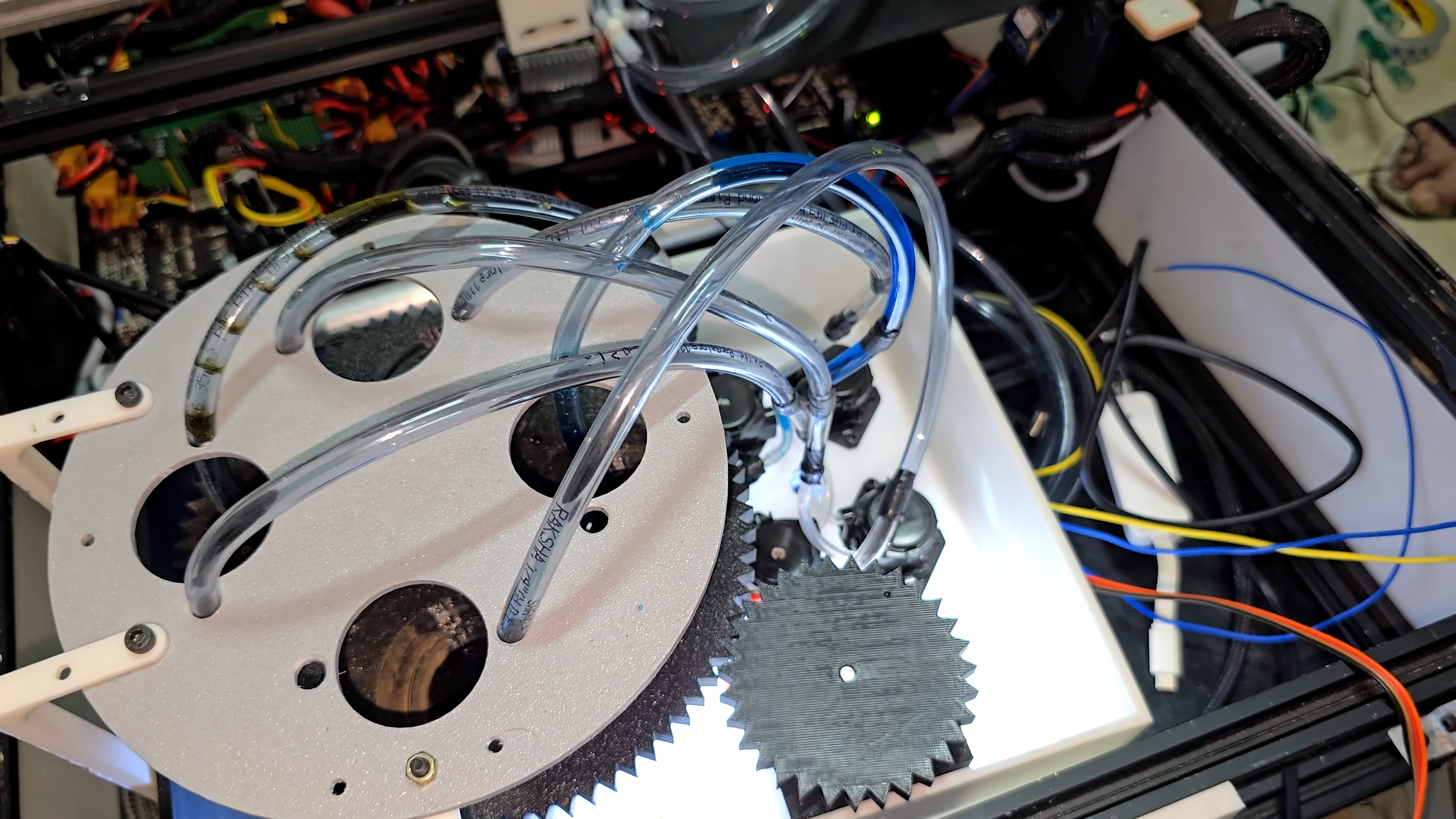
The rover’s Bio-Science Module is a four-part integrated system designed for thorough environmental and biochemical analysis of planetary analog sites. It combines precise sampling, advanced sensors, and robust mechanical handling to support in-situ science objectives at ERC.
- Rock sample weighing unit with a cushioned load-cell platform and transparent enclosure for safe, accurate specimen storage.
- Core drilling system with a contamination-resistant iris shutter and rotary funnel storage for reliable subsurface sampling.
- Analytical testing module equipped with pH, CO₂, amino acid, NIR, and Raman spectroscopy sensors for comprehensive sample analysis.
- Secondary three-DOF manipulator with a bucket-style scoop for efficient surface sampling and delivery to the testing unit.

Adityavardhan Srivastava
Batch: 2024
Science Lead

Ishwari Bhattacharya
Batch: 2024
Science Team
Sayak Maji
Batch: 2023
Science Team
Samyak Kasliwal
Batch: 2023
Science Team
Achintya Mathur
Batch: 2023
Science Team
Software
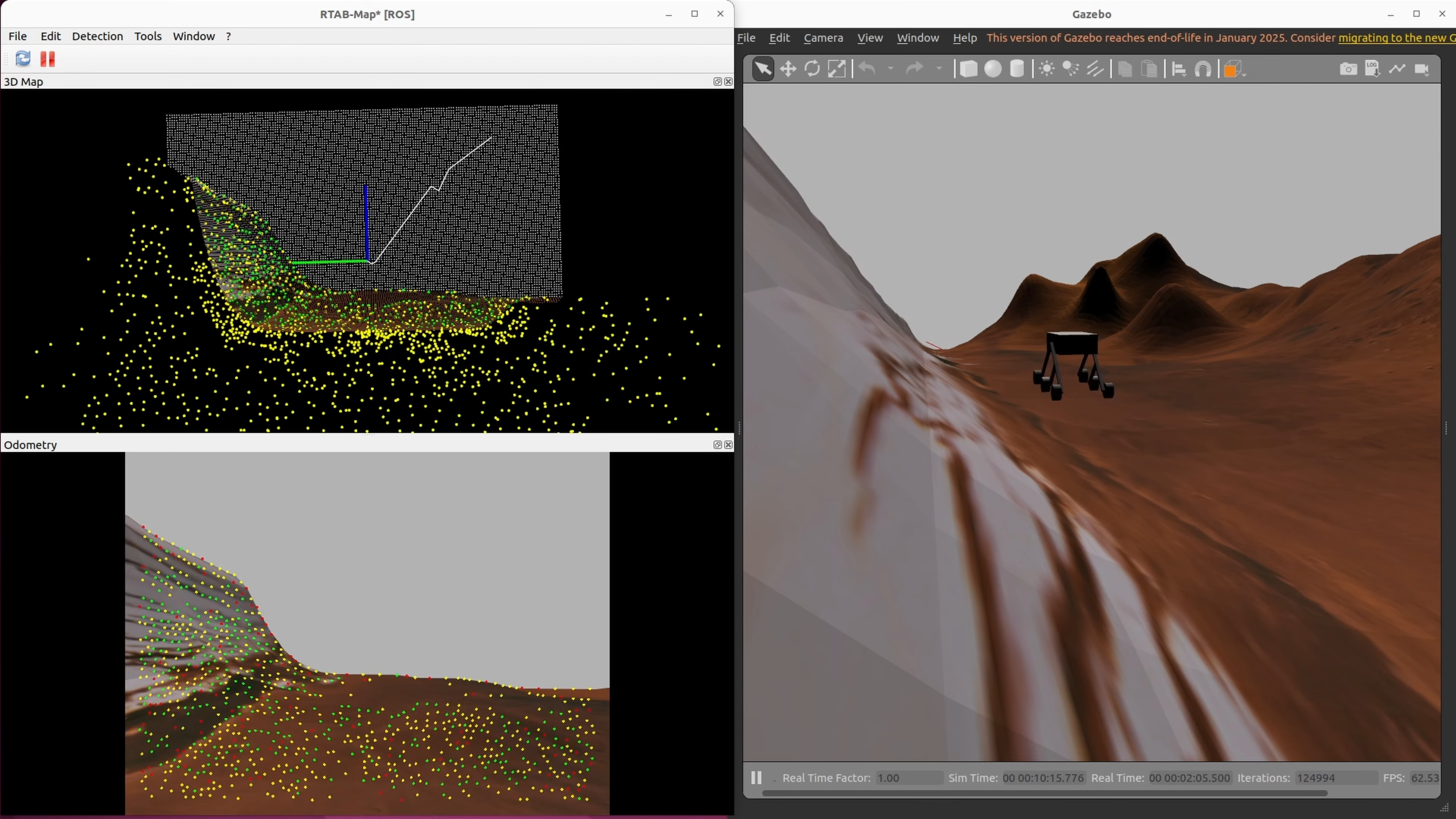
The rover’s hardware and navigation systems have been comprehensively redesigned for enhanced autonomy, accuracy, and robustness in GPS-denied environments. By integrating visual-inertial odometry, depth-based 3D SLAM, and efficient sensor fusion, the rover achieves reliable, energy-efficient navigation across challenging terrains.
- 10-axis IMU with depth camera-based VIO enables precise localization without GPS.
- Depth camera 3D SLAM replaces LiDAR, reducing power consumption while preserving high-resolution mapping.
- Extended Kalman Filter fuses IMU, depth, and wheel odometry data for accurate, drift-minimized navigation.
- Structured search and dynamic path planning ensure reliable target acquisition and obstacle avoidance under ROS 2.

Pritesh Jogdhankar
Batch: 2023
Software Lead

Pratham Gupta
Batch: 2023
AI/ML Lead

Pragnya Yadav
Batch: 2024
Assistant Lead

Deeptam Bhar
Batch: 2024
Software Team
Himanshi Sarode
Batch: 2024
Software Team
Krishna Gupta
Batch: 2024
Software Team

Swetha Reddy
Batch: 2024
Software Team
Science
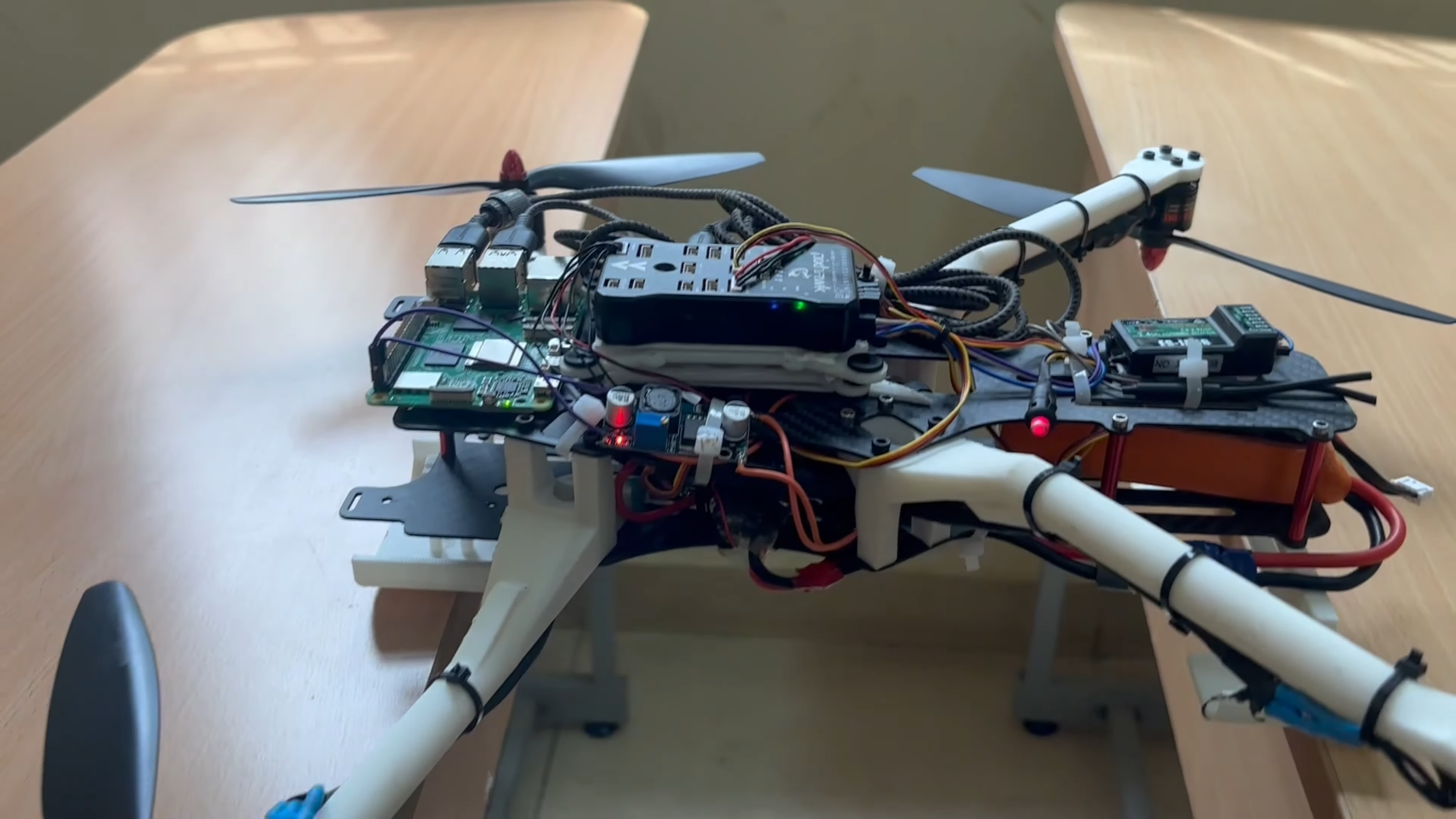
The drone is based on a lightweight TBS-500 carbon-fibre quadcopter frame, featuring a PX4-based control stack on a Cube Orange+ flight controller for robust, high-level autonomous operation. Its integrated safety, power, and communication systems ensure reliable, efficient, and secure performance for aerial support missions.
- 935KV EMAX motors with 10-inch propellers powered by a 3S 4200 mAh battery deliver up to 20 minutes of flight time.
- Cube Orange+ flight controller with redundant IMUs and fail-safes ensures stable and reliable flight control.
- 5G telemetry and Flysky FS-i6 provide long-range command, video downlink, and manual override capability.
- Autonomous emergency landing and kill switch enhance safety and fault tolerance during mission-critical operations.

Aldrin Nath
Batch: 2023
Drone Team
Sricheran Katta
Batch: 2024
Science Team
Sayak Maji
Batch: 2023
Drone Team
Pragnya Yadav
Batch: 2024
Drone Team

Prince Soni
Batch: 2024
Drone Team
Adityavardhan Srivastava
Batch: 2024
Drone Team